반응형
준비물
- COM port 사용 가능한 Linux Server
- USB Serial Port 사용 가능한 Windows Client
- USB to RS232 converter
1. hercules_3-2-8.exe 실행파일을 다운로드한다.
https://www.hw-group.com/software/hercules-setup-utility
Hercules SETUP utility | HW-group.com
www.hw-group.com
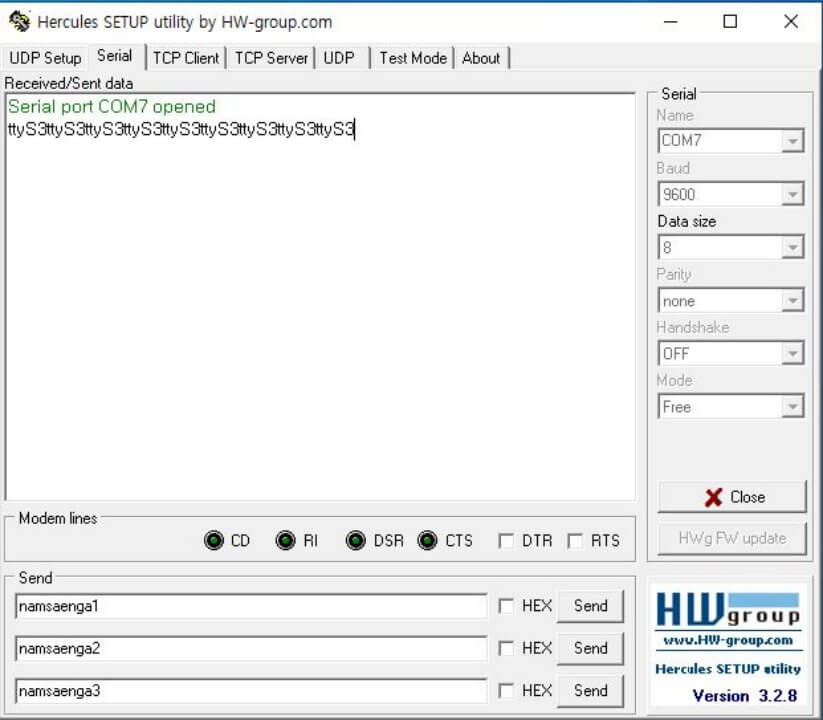
2. hercules_3-2-8.exe를 실행하고 '[Serial] > [Name]' 부분에 '[Windows Key] > [장치 관리자] > [포트(COM & LPT)] 포트번호'를 입력한다. Baud Rate는 리눅스 서버 프로그램 상에서 9600으로 설정할 것이기 때문에 9600으로 맞춰준다.
3. Linux에서 현재 몇 개의 시리얼 통신이 가능한지 확인한다.
[root@localhost ~]# ls /dev/ttyS*
/dev/ttyS0 /dev/ttyS1 /dev/ttyS2 /dev/ttyS3
4. 각 시리얼 통신 별로 바인딩해 줄 프로그램을 각각 작성한다.
- SerialComm1.cpp : /dev/ttyS0
- SerialComm2.cpp : /dev/ttyS1
- SerialComm3.cpp : /dev/ttyS2
- SerialComm4.cpp : /dev/ttyS3
<SerialComm1.cpp>
#include <stdio.h>
#include <string.h>
#include <fcntl.h>
#include <errno.h>
#include <termios.h>
#include <unistd.h>
int main() {
int serial_port1 = open("/dev/ttyS0", O_RDWR);
struct termios tty;
if(tcgetattr(serial_port1, &tty) != 0) {
printf("Error %i from tcgetattr: %s\n", errno, strerror(errno));
return 1;
}
tty.c_cflag &= ~PARENB;
tty.c_cflag &= ~CSTOPB;
tty.c_cflag &= ~CSIZE;
tty.c_cflag |= CS8;
tty.c_cflag &= ~CRTSCTS;
tty.c_cflag |= CREAD | CLOCAL;
tty.c_lflag &= ~ICANON;
tty.c_lflag &= ~ECHO;
tty.c_lflag &= ~ECHOE;
tty.c_lflag &= ~ECHONL;
tty.c_lflag &= ~ISIG;
tty.c_iflag &= ~(IXON | IXOFF | IXANY);
tty.c_iflag &= ~(IGNBRK|BRKINT|PARMRK|ISTRIP|INLCR|IGNCR|ICRNL);
tty.c_oflag &= ~OPOST;
tty.c_oflag &= ~ONLCR;
tty.c_cc[VTIME] = 10;
tty.c_cc[VMIN] = 0;
cfsetispeed(&tty, B9600);
cfsetospeed(&tty, B9600);
if (tcsetattr(serial_port1, TCSANOW, &tty) != 0) {
printf("Error %i from tcsetattr: %s\n", errno, strerror(errno));
return 1;
}
unsigned char msg[] = { 't', 't', 'y', 'S', '0', '\r' };
char read_buf1 [256];
while(1){
write(serial_port1, msg, sizeof(msg));
memset(&read_buf1, '\0', sizeof(read_buf1));
int num_bytes1 = read(serial_port1, &read_buf1, sizeof(read_buf1));
if (num_bytes1 < 0) {
printf("Error reading: %s", strerror(errno));
// return 1;
}
printf("Read %i bytes. Received message: %s", num_bytes1, read_buf1);
}
close(serial_port1);
return 0;
}
5. SerialComm1.cpp부터 SerialComm4.cpp 까지 컴파일하고 동시에 실행한다.
1) 4개의 소스코드 컴파일
[root@localhost ~]# g++ SerialComm1.cpp -o SerialComm1 && g++ SerialComm2.cpp -o SerialComm2 && g++ SerialComm3.cpp -o SerialComm3 && g++ SerialComm4.cpp -o SerialComm4
2) 4개의 소스코드를 실행하는 쉘 스크립트 작성
<init.sh>
#!/bin/sh
fork1() {(ps axf | awk '{print "./SerialComm1" }' | sh);}
fork1 &
fork2() {(ps axf | awk '{print "./SerialComm2" }' | sh);}
fork2 &
fork3() {(ps axf | awk '{print "./SerialComm3" }' | sh);}
fork3 &
fork4() {(ps axf | awk '{print "./SerialComm4" }' | sh);}
fork4 &
3) 쉘 스크립트 실행
[root@localhost ~]# ./init.sh
* 만약 cpp 소스코드가 작성하기 귀찮다면, 아래 내용으로 init2.sh를 구성하여 바로 실행시킨다.
<init2.sh>
#!/bin/sh
fork1() {(ps axf | awk '{print "cat /dev/ttyS3" }' | sh);}
fork1 &
fork2() {(ps axf | awk '{print "cat /dev/ttyS2" }' | sh);}
fork2 &
fork3() {(ps axf | awk '{print "cat /dev/ttyS1" }' | sh);}
fork3 &
fork4() {(ps axf | awk '{print "cat /dev/ttyS0" }' | sh);}
fork4 &
fork5() {(ps axf | awk '{print "sleep 5; echo ttyS3 > /dev/ttyS3" }' | sh);}
fork5 &
fork6() {(ps axf | awk '{print "sleep 5; echo ttyS2 > /dev/ttyS2" }' | sh);}
fork6 &
fork7() {(ps axf | awk '{print "sleep 5; echo ttyS1 > /dev/ttyS1" }' | sh);}
fork7 &
fork8() {(ps axf | awk '{print "sleep 5; echo ttyS0 > /dev/ttyS0" }' | sh);}
fork8 &
6. init.sh 실행결과
반응형
'프로그래밍 > OS' 카테고리의 다른 글
| 리눅스 상에서 시리얼 포트 추가로 인식하게 하는 방법 (0) | 2022.05.31 |
|---|---|
| USB에 복사한 linux OS 시스템의 파일을 사용하는 방법 (0) | 2022.05.27 |
| RHEL 디스플레이 해상도 800x600 보다 높은 값으로 설정 (0) | 2022.05.20 |
| grubby를 이용하여 커널 부팅 순서 변경하기 (0) | 2022.05.16 |
| dd command를 이용하여 Linux OS 시스템을 USB로 복사하기 (0) | 2022.05.10 |
댓글